很久之前看过<深入探索C++对象模型>大概也只能记得个虚表机制,但是最近在看虚继承的时候发现自己还是有点纠结C++内存布局,今天我就来实验并总结下。
C++之内存布局
前言
C++作为C语言的超集, 在无虚函数的情况下,C++并没有额外增加内存消耗。为了实现多态这一面向对象的性质,C++仅仅在每个含有虚函数的类中增加了一个虚函数指针。
首先来看看我们常说的C++虚拟内存的分布。
根据上图我想到两个常见的问题:
为什么栈的效率要比堆的效率高很多?
- 栈是系统提供的数据结构,计算机底层对栈提供支持:分配专门的寄存器(一般而言是一级存储结器),压栈和出栈都有专门的指令(好家伙玩特权!)。堆则是由C/C++函数提供(堆一般存放在二级存储器),库函数按照一定的算法在堆内存中搜索可用的空间大小。这样显然效率会比栈要低得多。
为什么栈要向下增长而堆要向上增长?
- 这样设计可以使得堆和栈能得到充分利用空闲的地址空间。如果栈向上增长的话那么就需要指定栈和堆的一个严格分界线。但是这个分界线没有很好的划分标准。有的程序使用的堆空间较多,有的程序使用的栈空间多。最好的方法就是让栈和堆一个向上增长,一个向下增长,这样它们就可以最大程度共用这块剩余的地址空间,达到利用率的最大化。
C++多态机制的本质
当调用对象的成员函数,编译器是如何识别是哪个对象在调用呢?
答案:编译器在编译阶段,进行函数的重构,即将成员函数进行非成员化。通过将this指针作为函数的第一个参数,通过this指针即可以找到对象的数据成员;
例如:
1 | Class Example { |
走进虚函数的世界
为了证实我们说的理论有具体的数据支撑,下面我们所有的测试都是在VS2019下进行的。
让我们先看看如何在vs2019上查看函数的布局。
- 右键vs2019上
xxx.cpp文件选中属性。
- 先选择左侧的C/C++->命令行,然后在其他选项这里写上
/d1 reportAllClassLayout,它可以看到所有相关类的内存布局,如果写上/d1 reportSingleClassLayoutXXX(XXX为类名),则只会打出指定类XXX的内存布局。
无继承状态
1 | class Base { |
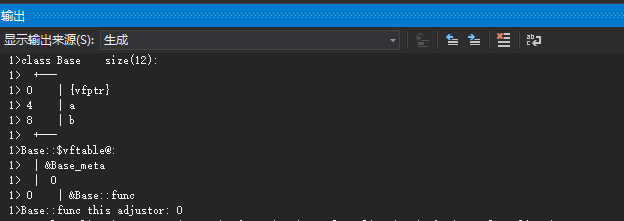
从上图可以看出,这个内存结构图分成了两部分,上面是内存分布,下面是虚表。
上半部: vs2019把虚表指针放在了内存开始处(0地址偏移量),然后再是依次声明的成员变量。
下半部: 紧跟在&Base_meta后面的0表示,这张虚表对应的虚指针在内存的分布。下面列出了虚函数,左侧的0是这个虚函数的序号,很显然这里只有一个虚函数。

单继承状态
1 | class Base { |
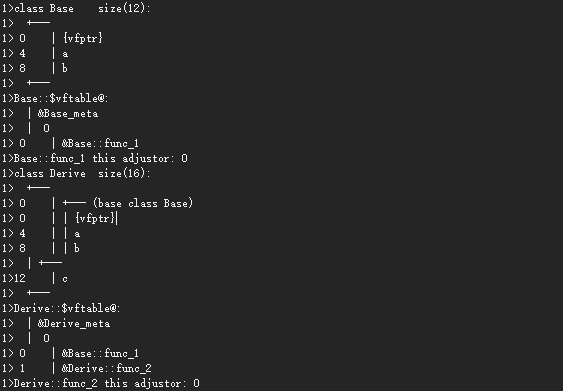
上图看来只是多了一个继承的类,从&Derive_meta后面可以看到有两个虚函数。
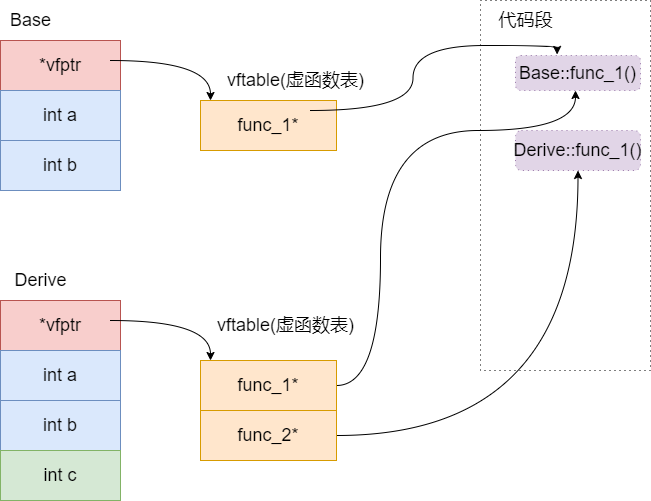
另外子类的内存布局:
- 虚函数指针
- 基类的成员函数
- 子类的数据
具体的内存布局图如下所示:
多继承状态
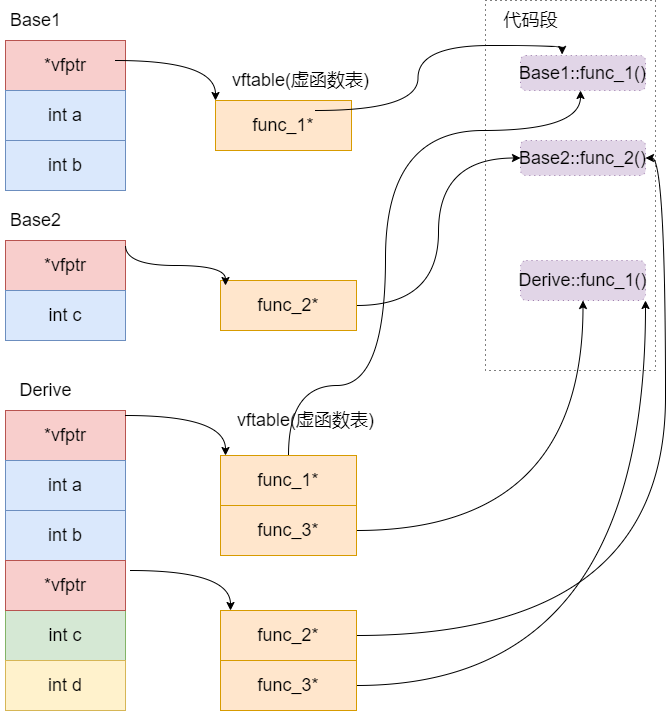
1 | class Base1 { |

从上图我们可以看出Derive的内存布局为: 首先是从左往右的继承.
1 | 1. 从Base1那里得到的虚函数指针(它继承来的虚函数指针和Base1中的指针并不是同一根) |
C++中的多态是怎么实现的呢?
谈到多态的实现首先要知道两个机制 1. 静态类型与动态类型 2. 虚函数表
- 静态类型与动态类型
- 静态类型:变量(对象)自身的类型 ===> 编译时确定
- 动态类型:指针(引用)所指向对象的类型 ===> 运行时确定
- 虚函数表就是我们上面讨论的.
实现C++多态,也就是动态绑定的过程大致分为三步:
- 调用对象必须是指针或引用
- 调用的函数为虚函数
- 类型转换方向是向上转换
虚继承
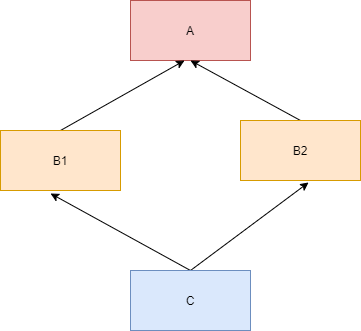
虚继承是多重继承中特有的感念。虚基类是为了解决多重继承中冗余成员而出现的。如类C继承自B1,B2,而类B1,B2都继承类A,因此类C中会出现两次类A中的变量和函数。为了节省内存,可以将B1,B2对A的继承定义为虚继承,而A就成为虚基类。
1 | class Base { |

注意看这张图,Derive的内存布局一开始是一个vfptr是一个虚函数指针(自己的),紧跟着一个vbptr(虚基类指针),-4表示偏移量。

虚基类表指针(vbptr),该指针指向了一个虚基类表,虚表中记录了虚基类与本类的偏移地址。通过偏移地址,这样就可以找到虚基类成员,而虚继承也不用像普通多继承那样维持着公共基类(虚基类)的两份同样的拷贝,从而节省了存储空间。